
En kısa yol bulma problemi günlük hayatta karşımıza sıklıkla çıkan bir problemdir. Adından da anlaşıldığı üzere, problemin amacı herhangi bir noktadan harekete başlayıp, belirli noktaları ziyaret etmek şartı ile varış noktasına en az enerji / en hızlı zaman / en az masrafla gitmek için seçilmesi gereken yolu bulmaktır. Problemin en temel kullanım alanlarından biri araç navigasyon sistemleri gibi görünse de evlerimizde kullanılan router (yönlendirici), robot navigasyonu, telemarket operatörlerinin zamanlanması gibi çok farklı alanlarda kullanılmaktadır. Algoritmanın bu kadar yaygın bir şekilde en iyileme gerektiren işlerde kullanılması, problemin çözümü kadar çözümün verimliliğini de önemli kılmaktadır.
Örneğin bir router kullanıcıyı en iyi şekilde internete ulaştırmaya çalışırken, en iyi yolu seçme aşamasında saniyeler kaybediyorsa, kullanıcıyı en hızlı yoldan dahi internetle buluştursa kullanıcının hissettiği kayda değer bir hızlanma olmayacaktır. Problemi akla gelebilecek en basit çözümüyle çözmeye çalışalım.
Sanırım problemin akla gelen ilk çözümü olası tüm yolların denenmesi ve en düşük enerjili yolun seçilmesidir. Bu yöntem doğruluk açısından hiçbir tehlike içermese de algoritmanın çalışma süresi oldukça yavaş olacaktır. İçerik tabanlı imge ölçekleme yazısında karşımıza çıkan problemi ele alalım. Örneğimizde bir enerji matrisinin ilk satırından başlayıp her satırdan bir kez geçerek son satırında son bulan, en az enerjili yolu arıyoruz.
Bu yolun sürekli olduğunu bildiğimizden ilk satırda herhangi bir sütundan başlayarak, her adımda bir piksel alt-sağa, bir piksel alt-sola veya doğrudan bir piksel alta hareket ederek resmin son satırına vardığımızda aranılan özellikte bir yol elde etmiş olacağız. Örnek matrisimizin boyunun MxN olduğunu düşünürsek, olası tüm yolların sayısı yaklaşık olarak Nx3^M (her satır için üç: alt-sağ, alt, alt-sol seçenek var) tanedir. Burada M’ nin küçük değerleri için yol hesabı yapmak mümkünken, M=20 için dahi (~9 milyar yol) işlem yapmak dakikalar alacaktır. Peki problemim çözümünü nasıl hızlandırılabilir?
Sorunun cevabı aslında problemin isminde de vurgulanan en kısa sıfatında. Aradığımız olası tüm yolların enerjisi olmadığından, en kısa yolu, uzun olacağı önceden belli yolları eleyerek adım adım tarama yöntemiyle bulabiliriz. Problemin çözümü için farklı yöntemler önerilse de bu yazımızda anlatacağımız Dinamik Programlama bu mantıkla çalışmakta.
Bir örnek üzerinden giderek dinamik programlama mantığını anlamaya çalışalım. Aşağıda görülen grafikte yuvarlak noktaları (düğümleri) matrisin elemanları, içlerindeki değerleri ise o elemana gelebilmek için gereken enerji olarak düşünelim. Amacımız en az enerjiyi harcayarak A düğümünden F düğümüne ulaşmak.
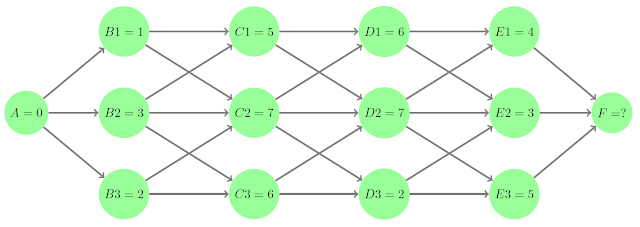
İlk olarak rastgele bir yol seçip enerji hesabı yapalım; A->B1->C2->D2->E1->F yolu için harcanan enerji A’ dan B1’ e 1, B1’ den C2’ ye 7, C2’ den D2’ ye 7, D2’ den E1’ e 4 ve E2’ den F’ e 0 olmak üzere toplam 1+7+7+4+0 = 19 olacaktır.
Aradığımız yol en az enerjili yol olduğundan, her adımda en az enerji gerektirecek yolu seçerek de bir sonuca ulaşabiliriz. Bu durumda A’ dan B1’ e 1, B1’ den C1’ e 5, C1’ den D1’ e 6, D1’ den E2’ e 3 ve E2’ den F’ ye 0 olmak üzere 1+5+6+3+0 = 15 olacaktır. Peki bu yol en düşük enerjili yol mudur?
Cevap tabi ki Hayır! Çünkü graf üzerinde A->B3->C3->D3->E2->F yolunu izleyerek, bitişe 13 toplam enerji ile ulaşabiliyoruz. Peki bu yolu nasıl bulabiliriz. Dinamik programlama, en az enerjili yolu bulmak için ileri doğru hesaplama yerine ileri-geri doğru hesaplama yapmayı öneriyor. Algoritma ileri yönlü hesaplamada her bir düğüme ulaşılabilecek en kısa yolu (E) bulmaya çalışıyor. A düğümünden B düğümlerine herhangi bir masraf olmadığından Eb1=1, Eb2=3 ve Eb3=2 alarak hesaplamaya C düğümlerinden başlayalım.
C1 düğümüne ulaşılabilecek en uygun yol C1 düğümüne gelen yollardan en az enerjiye sahip olanıdır. Yani Ec1=min(Eb1,Eb2)+C1=1+5=6, Ec2=min(Eb1,Eb2,Eb3)+C2=1+7=8 ve Ec3=min(Eb2,Eb3)+C3=2+6=8 bulunur. Yani C1 düğümüne ulaşmak için kullanılabilecek yolların en verimlisi A->B1->C1 yoludur ve gereken enerji miktarı 6 dır. Dikkat edilirse C1 düğümüne ulaşmanın alternatif bir yolu olan A->B2->C1 yolu daha fazla hesaplamaya katılamayacak.
Aynı hesaplamayı D düğümleri için de tekrarlayacak olursak; Ed1=min(Ec1,Ec2)+D1=6+6=12, Ed2=min(Ec1,Ec2,Ec3)+D2=6+7=13 ve Ed3=min(Ec2,Ec3)+D3=8+2=10 bulunur. Hesaplamayı E düğümleri için de yaparsak; Ee1=min(Ed1,Ed2)+E1=12+4=16, Ee2=min(Ed1,Ed2,Ed3)+E2=10+3=13 ve Ed3=min(Ed2,Ed3)+E3=10+5=15 bulunur.
E düğümü ile F arasında herhangi bir ağırlık bulunmadığından hesaplamayı burada tamamlayabiliriz. Elde ettiğimiz sonuçlar A düğümünden başlayarak E1 düğümüne 16, E2 düğümüne 13 ve E3 düğümüne 15 enerji ile gidebildiğimiz gösteriyor. Aradığımız F düğümüne ulaşan en kısa yol olduğundan bu yolun 13 enerjiye sahip olduğunu biliyoruz. Peki bu yolu nasıl bulacağız?
Bu sorunun cevabı da algoritmanın ikinci adımı olan geri yönlü taramada. Öncelikle ileri yönlü tarama sonucu elde ettiğimiz E enerji matrisini grafik üzerinde gösterelim.
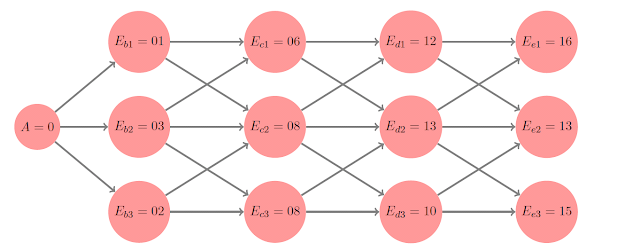
Çözümü verecek yolu bulmak için en düşük enerjili son düğümden başlayarak, her seferinde en düşük enerjili bir önceki düğümü seçerek geriye doğru ilerliyor ve her adımda hangi düğüm üzerinde geçtiğimizi yol listemize ekliyoruz. Yukarıda görseli verilen örnek için E2 düğümünden başlayarak, E2 den gidilecek en düşük enerjili yol D3 olduğundan D3 düğümüne geliyoruz. D3 düğümünde benzer bir karşılaştırma yaparak C2 ve C3 düğümlerininden birine (Enerjileri eşit, ikisinden biri ratsgele seçilebilir, biz C2 ile devam edeceğiz) geliyoruz. C2 düğümündense en küçük enerjiye sahip olan B1 düğümüne geliyoruz. Bu işlem sonucunda toplamda seyrettiğimiz yolu A->B1->C2->D3->E2->F ve enerjisini 13 olarak buluyoruz.
Gelelim kodlama kısmına, algoritmanın iki aşamadan oluştuğunu biliyoruz. İlk aşamada ileri yönlü bir tarama yapılacak ve her satır için bir üst satırdaki üç enerji değerinden en küçüğü o hücrenin enerji değerine eklenecek.
int DinamikEnerji(int *Enerji,int *TE, int M, int N)
{
int kts = 0,i,j,minI=0;
for(i=0;i < N; i++) { ToplamEnerji[i] = Enerji[i]; }
for(j=1;j < M ;j++)
{
kts = N*j;
for(i=0;i < n; i < N-1)
TE[i+kts] = Enerji[i+kts] + min3(TE[i+kts-N-1],TE[i+kts-N],TE[i+kts-N+1]);
else if(i==0)
TE[i+kts] = Enerji[i+kts] + min3(1e16,TE[i+kts-N],TE[i+kts-N+1]);
else if(i==(N-1))
TE[i+kts] = Enerji[i+kts] + min3(TE[i+kts-N+1],TE[i+kts-N],1e16);
}
}
for(i=0;i < N; i++)
{
if (TE[kts+i] < TE[kts+minI]) { minI = i; }
}
return minI;
}
Dikkat edilecek olursa kod içerisinde yapılan işlemlerde bundan ibaret. Yazıda E ile tanımladığımız toplam enerji kod içerisinde TE; B,C,D,E ile gösterdiğimiz düğüm enerjileri ise Enerji matrisi içerinde saklanmakta. Bu fonksiyon ile ihtiyacımız olan TE ve en küçük enrjili son düğüm bilgisine ulaşıyoruz. En düşük enerjili yolu bulmak içinse aşağıdaki geri tarama yapan kodu kullanmamız gerekiyor.
int* MinEnerjiYolu(int *TE, int *path, int minI, int M, int N)
{
path[M-1] = minI;
int a,b,c,j;
int idx = -1;
for (j = M-2; j >= 0; j--)
{
a = TE[j*N+path[j+1]-1]; //bir üst, sol
b = TE[j*N+path[j+1] ]; //bir üst
c = TE[j*N+path[j+1]+1]; //bir üst, sağ
idx = -1;
if (a > b) { a = b; idx++; }
if (a > c) { a = c; idx++; }
if (path[j+1]+idx < 1 ) { b < c ? idx=0 :idx=1; }
if (path[j+1]+idx > N-1) { a < b ? idx=-1:idx=0; }
path[j] = path[j+1]+idx;
}
return path;
}
Burada da yukarıda anlatılan işlemler dışında bir işlem bulunmamakta. Kod içerisinde yapılan if kontrolleri komşu aramalarında imge sınırlarının dışına çıkılmaması için konulan bir kontrolü içermekte.
Algoritma sunulan hali ile girişte bahsedilen tüm problemlere uygulanabilir durumda (Enerji matrisinin uygun şekilde doldurulması ile). Algoritma ve kullanımı hakkında daha farklı bilgiler edinmek isterseniz şu bağlantıya göz atabilirsiniz.
Referanslar
-
Avidan, Shai, and Ariel Shamir. “Seam carving for content-aware image resizing.” ACM Transactions on graphics (TOG). Vol. 26. No. 3. ACM, 2007.
-
Efros, Alexei A., and William T. Freeman. “Image quilting for texture synthesis and transfer.” Proceedings of the 28th annual conference on Computer graphics and interactive techniques. ACM, 2001.